
I am relying on the excellent series on Youtube by Iman: Signal Processing 101 for this series of articles. This series focuses on continuous signal processing. I am also working on a digital/discrete signal processing series.
1. What is signal processing?
A signal is a time-varying physical process.
Signals can be :
- voice
- videos or images
- temperature records
- stock prices
- health records
- …
The act of processing a signal using a system is called signal processing. A signal contains information. A system processes this information.
Signal processing is implied when you:
- make a phone call
- use a voice assistance
- listen to the radio
- edit a picture
- …
2. Signal representation
Signal can be :
- 1-dimensional : On a voice record for example, each point can be represented on a value vs. time plot. If you know the time, you can retrieve the value.
- 2-dimensional: An image is 2 dimensional, since you need both x and y to characterize the value of a pixel on an image
- 3-dimensional: A video is made of a sequence of images. You need x, y and the index of the image
tto know the value of a pixel.
This is called signal representation. We will however focus on 1-dimensional signals.
3. Discrete vs. Continuous
Signal processing is divided in 2 categories:
- continuous/analog signal processing : a signal continuous in time taking continuous range of amplitude values, defined for all times.
- discrete/digital signal processing : a discrete signal for which we only know values of the signal at discrete points in time.
A 1-dimensional continous signal could for example be:
\[x(t) = sin(2 \pi f_o t)\]Where:
trepresents the time- \(f_o\) represents the frequency, in Hz (number of cycles per second)
- \(2 \pi f_o t\) is an angle measured in radians
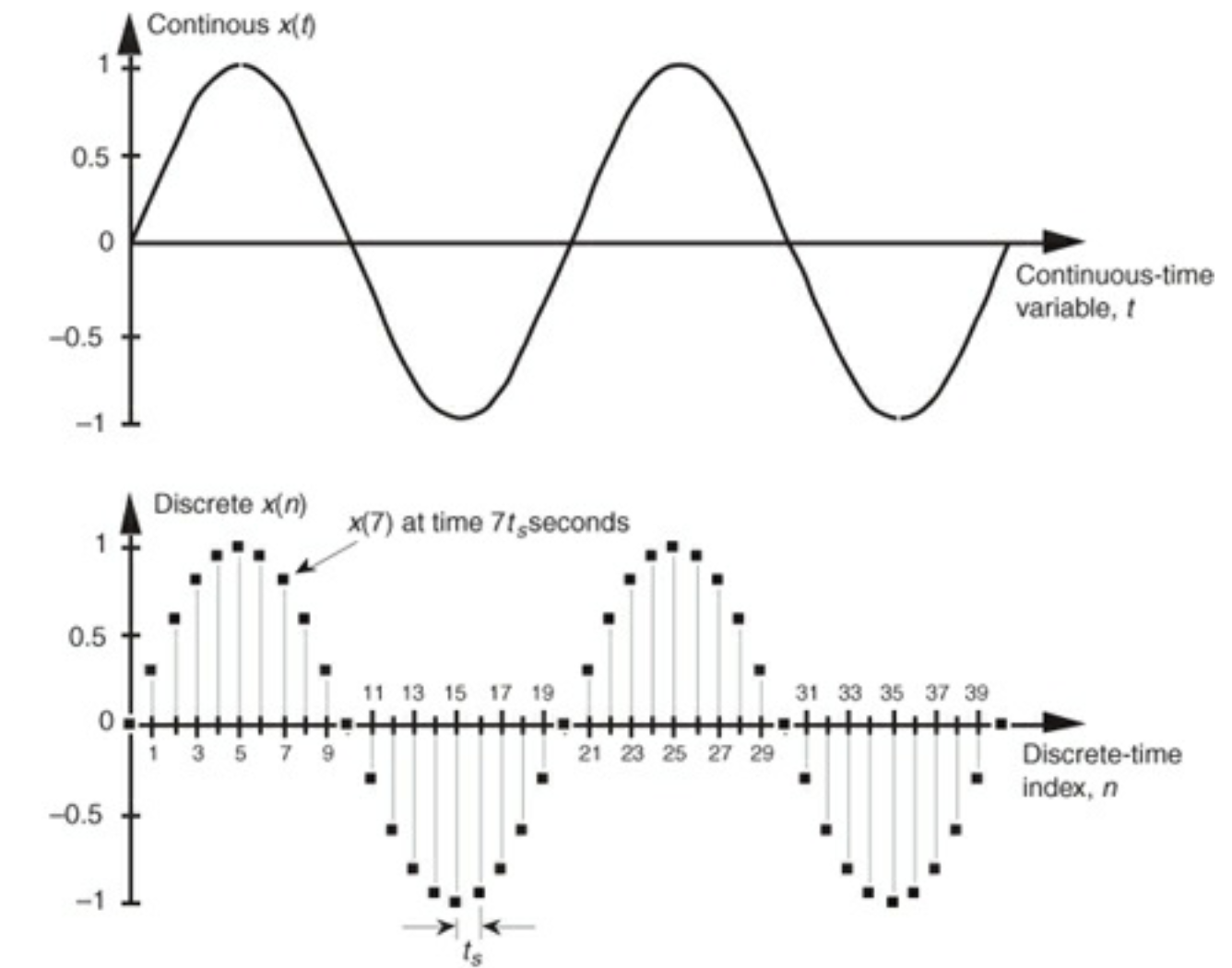
A discrete-time signal quantizes the time and the signal amplitude. We might have a discrete signal taking the following form:
(0, 0)
(1, 0.31)
(2, 0.59)
(3, 0.81)
...
Where the first value is the index, and the second is the value. The discrete signal can be represented as :
\[x(n) = sin(2 \pi f_o n t_s)\]Where:
- n is the index (0, 1, 2, 3…)
- \(t_s\) is the time sample, i.e. the time between 2 indexs
Continuous and discrete signals can be represented as such:
4. Signal transformation
4.a. Continuous
We can apply transformations to a continuous signal \(x(t)\). For example:
- \(x(2t)\) : doubles the speed of a signal. We talk about signal compressing in time direction.
- \(x(t/2)\) : reduces by 2 the speed of a signal. We talk about signal expansion in time direction.
- \(x(-t)\) : time reversal transformation.
- \(x(t+2)\) : time shifting transformation to the left. We play the signal two units sooner.
- \(x(t-2)\) : time shifting transformation to the right. We play the signal two units later.
Transformations applied in the parenthesis usually affect the time direction. However, transformations applied outside the parenthesis affect the value axis:
- \(2x(t)\) : magnify the amplitude. We multiply the amplitude by two. If the value of 2 is smaller than 1, we say that we compress the signal in value direction.
- \(x(t) + 2\) : shift the whole signal up by 1 unit.
To summarize, we can apply the following transformations:
- time shifting
- time scaling
- amplitude shifting
- amplitude scaling
4.b. Discrete
A Discrete System is any software operating on a discrete-time signal sequence, and producing a discrete output sequence using a transformation. A simple Discrete System can be defined by a difference equation:
\[y(n) = 2 x(n) - 1\]The same concepts as for continuous signals regarding the transformations apply.
For what comes next, we will focus exclusively on continuous signals.
5. Continuous Signal properties
Even signals
If \(x(t) = x(-t)\) this means that the signal is symmetric around the x-axis.
We talk about even signals.
Odd signals
If \(x(t) = -x(-t)\), we reflect the signal with respect to the origin and the signal is odd.
To test if a function is even or odd or neither, just replace t by -t in the expression and check for the equality.
Periodic
A signal is periodic if the same pattern repeats for ever.
Some common periodic functions are \(sin(a t)\), \(cos(a t)\), \(e^{j a t}\).
The fundamental period for these signals is \(\tau = \frac{2 \pi}{a}\). A more complex signal could be :
\[x(t) = sin(\pi t + \pi / 4)\]In this case, the period is : \(\tau = 2 \pi / \pi = 2\).
We can combine two periodic signals \(x_1\) of period \(T_1\) and \(x_2\) of period \(T_2\). The output signal is periodic if \(\frac{T_1}{T_2}\) is rational.
The period of this third signal is the least common multiple between \(T_1\) and \(T_2\).
For example, if:
- the first signal is : \(x_1(t) = cos(6 \pi t)\). The period is \(\frac{2 \pi}{6 \pi} = \frac{1}{3}\).
- the second signal is : \(x_2(t) = sin(30 \pi t)\). The period is \(\frac{2 \pi}{30 \pi} = \frac{1}{15}\).
- the combined signal can be written as : \(x(t) = cos(6 \pi t) + sin(30 \pi t)\)
The ratio between \(T_1\) and \(T_2\) is 5 which is rational. The combined signal is Therefore, \(T_3\) is the least common multiple between \(T_1\) and \(T_2\) which is \(\frac{1}{3}\).
6. Continuous Elementary Signals
There are some elementary signals which are basic building blocks of many other signals:
- the unit step
- the unit impulse
Unit Step
The unit step is a function which is 1 when t is greater or equal than 0, and 0 otherwise.
\[u(t) = \left\{ \begin{array}{ll} 1 & \mbox{if } t ≥ 0 \\ 0 & \mbox{otherwise.} \end{array} \right.\]For example, a function that takes values 1 between 0 and 1, and 0 everywhere else can be seen as the unit step minus a shifted version of the unit step by 1 unit:
\[f(t) = u(t) - u(t-1)\]Unit Impulse
This function is 0 everyhere except at the origin, where the value is 1.
\[\delta(t) = \left\{ \begin{array}{ll} 0 & \mbox{if } t ≠ 0 \\ 0 & \mbox{if } t = 0 \end{array} \right.\]Equivalence property
The equivalence property states that:
\[x(t) * \delta(t - t_0) = x(t_0) * \delta(t - t_0)\]This is because the only point at which \(x(t)\) is not 0 when multiplied by the delta term is at \(t_0\), since \(delta(t-t_0)\) is a shifted unit impulse by \(t_0\).
This can be used to reduce the expression of this signal for example:
\[sin(t) \delta(t - \frac{\pi}{6}) = sin(\frac{\pi}{6}) \delta(t - \frac{\pi}{6}) = \frac{1}{2} \delta(t - \frac{\pi}{6})\]Sifting property
The sifting property similartly states that:
\[\int_{- \infty}^\infty x(t) \delta(t-t_0) dt= x(t_0)\]This can be used to reduce the expression of this signal for example:
\[\int_{- \infty}^\infty cos(2t) \delta(t-1) dt = cos(2 * 1) = cos(2)\]Note that there is a strong link between the unit impulse and the unit step functions. Indeed:
$$
\int_{- \infty}^t \delta(\tau) d \tau = \left{
\begin{array}{ll}
0 & \mbox{if } t < 0
1 & \mbox{if } t ≥ 0
\end{array}
\right. \(= u(t)\)
7. Continuous System properties
Recall that a system is any software operating on a signal sequence, and producing an output sequence using a transformation.
For example:
\[y(t) = x(-2 t)\]Memoryless
A system is said to be memoryless if the output at a time t depends only on the input at that same time, and not on information from the past.
The system mentioned above is obviously not memoryless since the output depends on previous or future values of the input.
Causality
A system is said to be causal if the output only depends on current or previous values of the input, not future values.
A song for example might be a non-causal system since the signal has already been totally recorded.
Stability
A system is said to be BIBO (bounded-input bounded-output) stable if for any bounded input, we get a bounded output. The signal should be within a finite range.
For example, \(y(t) = \frac{x(t)}{t}\) is not bounded.
Invertibility
A system is said to be invertible if each element of the input corresponds to a unique element of the output, as a one-to-one.
An example of a non-invertible system is the following:
\[y(t) = sin(x(t))\]Since when \(x(t) = 0\), then \(y(t) = sin(0) = 0\). But we can find a second input that leads to the same output with \(x(t) = \pi\) and therefore \(y(t) = sin(\pi) = 0\).
Time-invariant
A system is said to be time-invariant if it does not change over time. A system is time-invariant if a time-shift in the input results in the same time-shift in the output: \(y(t) = y(t - T)\).
The following system is not time-invariant for example:
\(y(t) = x(2t)\) \(y(t - T) = x(2(t-T)) = x(2t - 2T) ≠ x(2t - T)\)
On the other hand, \(y(t) = sin(x(t))\) is time-invariant.
Linear
A system is said to be linear if the linear combination of inputs leads to a linear combination of the outputs: \(a x_1(t) + b x_2(t) = a y_1(t) + b y_2(t)\).
A system is said to be LTI (or Linear & Time-Invariant) if it is both Linear and Time-invariant.
Impulse Response
The impulse response of a dynamic system is the output when presented with a brief input signal called an impulse.
If a system is LTI, and you make an impulse signal \(\delta(t)\) go through a black-box system, then the impulse response, aka the output, is \(h(t)\).
To find the impulse response, one simply needs to replace the input by \(\delta(t)\). For example:
\[y(t) = x(t-2)\]Leads to the impulse response:
\[h(t) = \delta(t-2)\]Convolution
Take an LTI system. Based on these properties, you know that:
\[\delta(t) \rightarrow h(t)\] \[\delta(t - \tau) \rightarrow h(t - \tau)\] \[x(\tau) \delta(t - \tau) \rightarrow x(\tau) h(t - \tau)\] \[\int_{- \infty}^\infty x(\tau) d \tau \delta(t - \tau) \rightarrow \int_{- \infty}^\infty x(\tau) h(t - \tau) d \tau\]What this highlights when we apply a series of linear transformations here is the following. By sifting property, the left term is equal to \(x(t)\).
\[x(t) \rightarrow y(t) = \int_{- \infty}^\infty x(\tau) h(t - \tau) d \tau\]This transformation is called the convolution, and is denoted as such:
\[y(t) = x(t) * h(t)\]This mainly means that for an LTI system, when the impulse response is given, you can find the output of any input if you just find the result of the integral.